Technology
Huawei autonomous driving navigation system with satellite positioning technology could be powerful

In the past, Huawei several times states that it will not build cars but only developing ICT Technology to helps the automobile companies in building a good car. At the moment, the company’s main focus on autonomous driving-related technology.
According to information, Huawei has published a new patent related to automatic driving navigation technology on June 1 with publication number CN108027242B, which was applied back in 2015 in China.
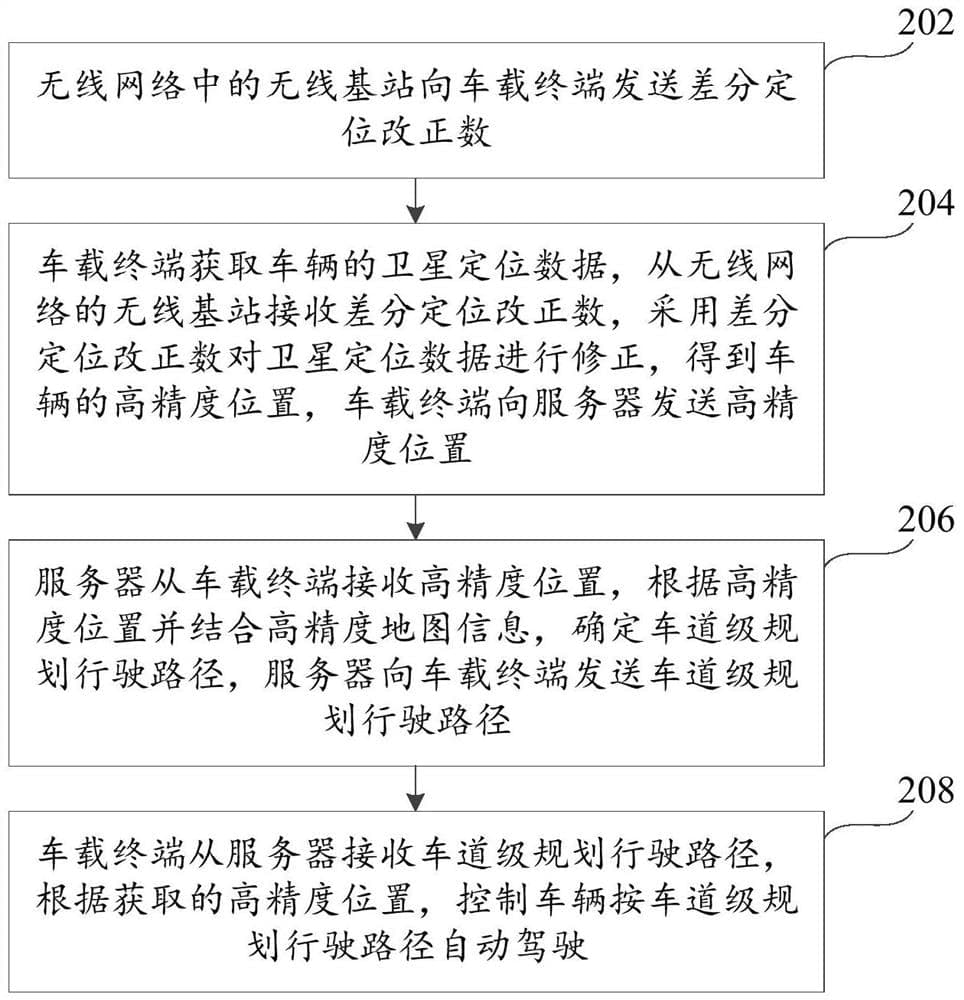
The patent document describes an automatic driving navigation method, device, system, vehicle device, and server. The method includes the satellite differential positioning technology based on a wireless network that sends the three-point positioning correction number (202) to the vehicle device.

The vehicle device obtains the satellite positioning data of the vehicle change, and also the satellite positioning data from the wireless network. The wireless base station of the network receives the differential positioning correction number and uses it to correct the satellite positioning data to obtain the high-precision position of the vehicle.
The vehicle-mounted device sends the high-precision position to the server (204) and the server receives the high-precision position from the vehicle. According to the high-precision location and combined with the heightmap information, determine the lane-level planning driving path, and the service vehicle sends the lane-level planning administrative route (206).
The vehicle finally receives the lane-level planning travel path from the server, and according to the acquired high-precision location, the control car is driven by the lane-level planning driving path (208).
The use of satellite differential positioning technology assisted by wireless networks has realized automatic driving and navigation in all road conditions. The accuracy of target positioning is as good as that of 3D high-precision maps. The adaptability and reliability of the scheme are remarkable.
On the other hand, the existing automatic driving navigation method uses a 64-lidar and 3D high precision map to realize the positioning and navigation of the vehicle. But, it has some issues:
- 64-line lidar has high requirements for environmental conditions, and its detection will be seriously affected by severe weather such as rain, snow, haze, etc., so all-weather positioning and navigation cannot be achieved.
- Fixed objects such as buildings and landmarks in the actual environment will change from time to time. If the images stored in the 3D high-precision map are not updated in time, the positioning accuracy will be affected.
(Via – ithome)